Los objetos voladores siempre ha ejercido una gran fascinación para el hombre, alentando todo tipo de investigaciones y desarrollos.
El proyecto HAWK pretende diseñar, crear y controlar un VTOL UAV (Vertical Take-Off and Landing Unmanned Aerial Vehicle), o vehículo aéreo no tripulado de aterrizaje y despegue vertical, de tipo multirotor.
El interés se produce no sólo por su dinámica, la cual representa un atractivo problema de control, sino también por el aspecto de diseño. Integrar los sensores, actuadores e inteligencia en un sistema ligero de vuelo vertical con un tiempo de operación decente no es trivial.
Actualmente el mercado de los UAV ligeros crece a gran velocidad y se basa en la creciente demanda para este tipo de producto tecnológico para aplicaciones civiles y militares. Estos productos ligeros, capaces de operar en diferentes ejes de coordenadas y con varios rotores, tienen un número ventajas sobre otras aeronaves de apoyo logístico basadas en un único rotor (helicópteros). Estos requieren buenas habilidades y larga experiencia para su manejo y a su vez requieren de un mantenimiento complejo. Los multi-rotores son sistemas robustos y simples con despegue vertical y baja estabilidad estática, capaces de levantar cargas pesadas. De momento hay un espacio vacío en el mercado de los UAV multirotores desde un punto de vista tecnológico. El proyecto HAWK intenta llenar ese hueco a través del uso de nuevas tecnologías. Algunos posibles usos potenciales son:
- Estudios de imágenes aéreas.
- Control de líneas de alto voltaje.
- Reconocimiento de aerogeneradores.
- Análisis de estructuras arquitectónicas.
- Inspección de zonas dañadas por desastres.
- Control de plagas.
- Filmación aérea profesional.
- Supervisión de la vida salvaje.
- Estudios científicos y técnicos.
- Usos de la policía y cuerpo militar (identificación y monitorización de demostraciones, concentraciones, etc.)
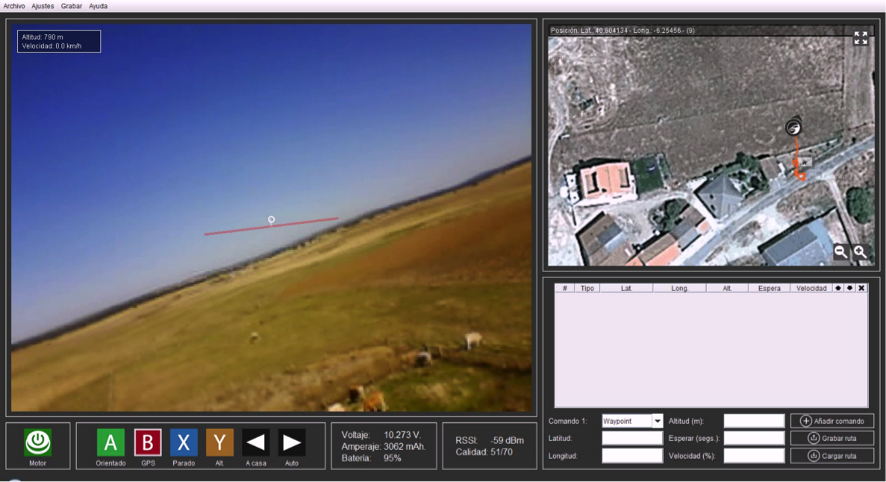
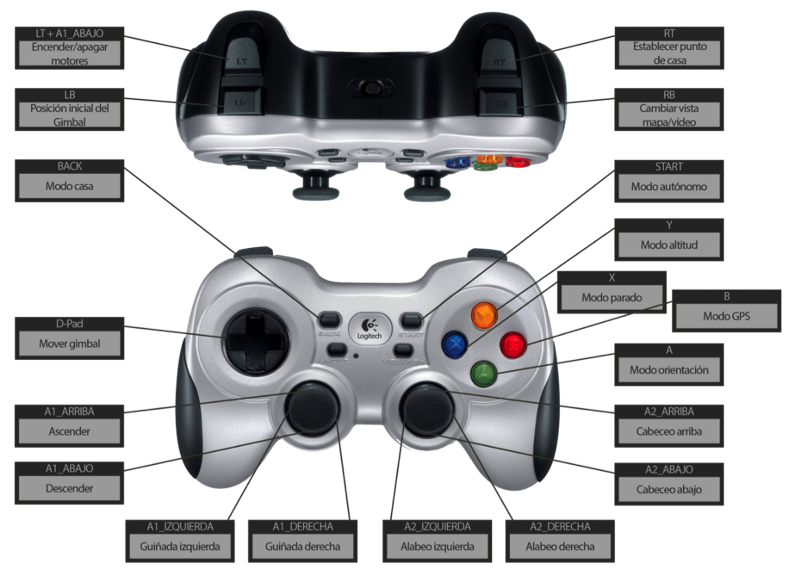
El control de los UAV es un área con muchas posibilidades y BISITE está actualmente trabajando en un proyecto para las fuerzas de seguridad del estado en colaboración con un consorcio de compañías. Se ha desarrollado un software de control y monitorización que se ejecuta desde una estación base y que permite el control manual y automático desde el puesto de control en tierra.
Los principales objetivos de este software son:
- Software independiente del UAV controlado
- Desarrollo modular que permita su extensión y adaptación a UAVs adaptados a diferentres trabajos profesionales.
- Sistema de guiado por puntos que permita un trazado autónomo a través de misiones previamente diseñadas gracias a un mapa geoposicionado.
- Recibir y visualizar telemetría de los sensores del drone en tiempo real.
- Recibir y visualizar vídeo en tiempo real.
- Comunicación inalámbrica de alto alcance, segura y bidireccional.