Flying objects have always exerted a great fascination on man encouraging all kinds of research and development.
HAWK Project aims to design, create and control a VTOL UAV (vertical take-off and landing unmanned aerial vehicle) multi-rotor aircraft.
The interest comes not only from its dynamics, which represent an attractive control problem, but also from the design issue. Integrating the sensors, actuators and intelligence into a lightweight vertically flying system with a decent operation time is not trivial.
Currently the UAV light aircraft market grows rapidly and it is based on the growing demand for this type of technology products in both civilian and military applications. These "light vehicles" capable of operating in different coordinate axes and with several rotors, have a number of advantages over other support aircraft based on a single rotor (helicopters). These ones require great skill and long experience for handling, while involving a complex maintenance. The multi-rotors are robust and simple systems with vertical takeoff and a low static stability, able to lift heavy loads. At present there is a empty space on the multi-rotor UAV market from the technological standpoint. HAWK project tries to fill that gap through the use of new technologies. Some possible potential uses are:
- Studies of aerial imagery.
- Control of high voltage lines.
- Recognition of windmills.
- Analysis of architectonic structures.
- Inspection of damaged areas by disasters
- Pest Control.
- Professional aerial filming.
- Wildlife supervision.
- Scientific and technical studies.
- Police and military uses (identification and monitoring of demonstrations, rallies, etc.).
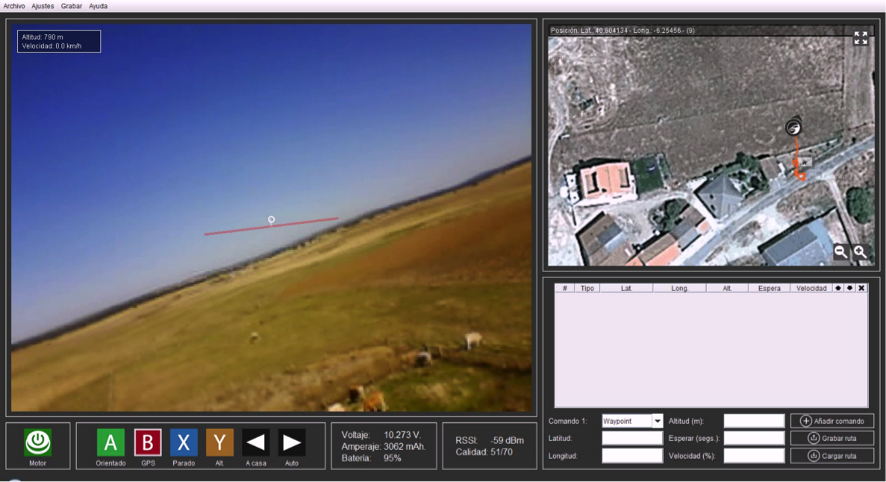
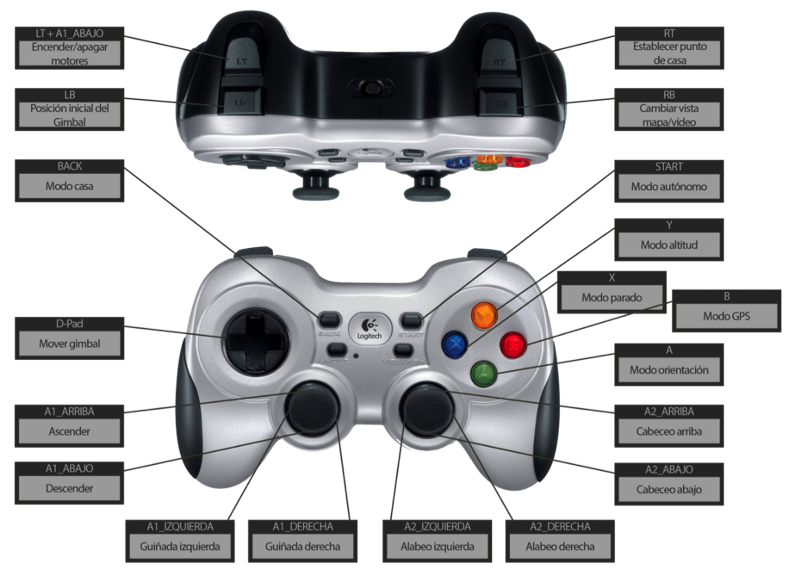
UAV control is an area with many possibilities and BISITE is currently working on a project for the state security forces in collaboration with a consortium of companies.A control and monitoring software that runs from a 'base station' has been developed and it enables automatic and manual control of UAVs from the ground. The main goals of this software are:
- Independent Software of the controlled UAV.
- Modular development that allows its extension and adaptation to different types of UAVs and specific professional tasks.
- Waypoints system allowing autonomous guided through pre-programmed missions and a map geopositioned.
- Receiving and viewing real-time telemetry captured by UAV sensors.
- Receiving and viewing real-time video board.
- Wireless communication, long range and safe.